

(SexComb, ismét)
Az egyik legutóbbi blogbejegyzés hozzászólásai között bukkantam egy érdekes hivatkozásra, Dr. Holovács József egyik előadásának az összefoglalójára. Nem sok időt pazarolnék rá, csak kiemelném a fontosabb megállapításait:
"Mivel az információ szellemi, intellektuális kategória, ezért bármilyen vezérlési rendszer tervezése, létrehozása és működtetése megfelelő intellektuális erőforrást igényel."
" A természettudomány terjedelmes tudományos érveléssel rendelkezik az evolúcióelmélet kritika terén. Az utolsó évtizedekben ez a kritika fegyelembe veszi az információ, mint filozófiai kategória, tulajdonságait is. A filozófia alapkérdésének a megoldása attól függ, hogy milyen a válasz a „teremtés kontra evolúció” kérdésre. A jelenlegi tudomány válasza – „teremtés”."
"A célszerű „mozgás”, a vezérlés mögött mindig az információ van, és az információ keletkezésére szükség van egy intellektuális egyénre, aki akarattal rendelkezik, képes célokat megfogalmazni, és a céloknak megfelelő vezérlési algoritmusokat létrehozni. Ezért, ha egy objektumról kiderül, hogy annak a „mozgása” reguláris, akkor egyértelmű, hogy ennek a „mozgásnak” a hátterében egy intellektuális erőforrás van."
"Az objektum „mozgása” intellektuális komponens nélkül csak kaotikus lehet."
"A belső vezérlésre esetén a vezérlési algoritmusok és más információ be vannak építve az objektumba. Például, ide tartoznak
- - automatikusan működő műszaki rendszerek
- - költöző madarak autonóm repülése
- - a DNS-ben tárolt információ, mely alapján történik a fehérje szintézise."
"Nyilvánvaló, hogy bonyolult dinamikus tulajdonsággal rendelkező objektumok bonyolultabb intellektuális komponenst igényelnek."
"Ha valaki az evolúcióelmélet alapján kijelenti, hogy az élővilág (az embert is beleértve) spontán módon jött létre, akkor ez a kijelentés azt jelenti, hogy egyidejűleg:
Bk << Bn
és
Ik >> In, In = 0
(0 érték azt jelenti, hogy nincs szükség intellektuális erőforrásra, mivel a rendszer spontán módon jött létre). Természetesen a gyakorlatban ezt nem tapasztalható. Tényleg, ha kijelentjük, hogy egy rendszer spontán, kaotikus módon jött létre, akkor egyidejűleg ez azt is jelenti, hogy ebben az esetben nincs szükség intellektuális erőforrásra, hiányzik a célvektor, hiányoznak a vezérlő algoritmusok. Ez abszurdum, mivel még a legegyszerűbb objektum létrehozása is bizonyos intellektuális erőforrást igényel."
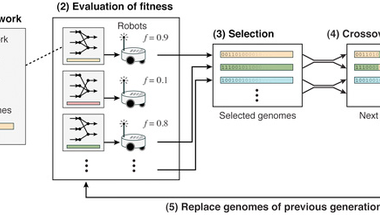
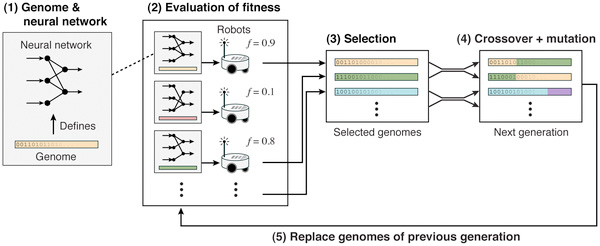
Kemény szavak ezek valóban, de olvassunk csak el egy összefoglaló közleményt, ami a PLoS Biology című lapban jelent meg nemrég! Maga a cikk egyébként bárki számára ingyen hozzáférhető, érdemes megnézni a hozzá mellékelt filmeket is, nagyon aranyosak a küszködő robotok. Miről is szól ez a közlemény? Több kísérletet foglal össze, ahol azt vizsgálták, hogy véletlenszerűen előállított vezérlőrendszerek a legalapvetőbb darwini evolúcióval képessé válhatnak –e bonyolult feladatok elvégzésére? Ehhez apró robotokat építettek, amelyek vezérlőprogramját véletlenszerűen állították elő, majd kiválasztották a legjobban működőket (=szelekció), ezekben hibákat hoztak létre a programokban (=mutáció) és újra a legnagyobb fittneszű programot kiválasztva abban újra véletlenszerű hibákat hoztak létre. Ezeket a kísérleti rendszereket nem meglepő módon "evolúciós robotikának" nevezték el. No de min is dolgoztak ezek a derék kutatók?
(SexComb, ismét)
Az egyik legutóbbi blogbejegyzés hozzászólásai között bukkantam egy érdekes hivatkozásra, Dr. Holovács József egyik előadásának az összefoglalójára. Nem sok időt pazarolnék rá, csak kiemelném a fontosabb megállapításait:
"Mivel az információ szellemi, intellektuális kategória, ezért bármilyen vezérlési rendszer tervezése, létrehozása és működtetése megfelelő intellektuális erőforrást igényel."
" A természettudomány terjedelmes tudományos érveléssel rendelkezik az evolúcióelmélet kritika terén. Az utolsó évtizedekben ez a kritika fegyelembe veszi az információ, mint filozófiai kategória, tulajdonságait is. A filozófia alapkérdésének a megoldása attól függ, hogy milyen a válasz a „teremtés kontra evolúció” kérdésre. A jelenlegi tudomány válasza – „teremtés”."
"A célszerű „mozgás”, a vezérlés mögött mindig az információ van, és az információ keletkezésére szükség van egy intellektuális egyénre, aki akarattal rendelkezik, képes célokat megfogalmazni, és a céloknak megfelelő vezérlési algoritmusokat létrehozni. Ezért, ha egy objektumról kiderül, hogy annak a „mozgása” reguláris, akkor egyértelmű, hogy ennek a „mozgásnak” a hátterében egy intellektuális erőforrás van."
"Az objektum „mozgása” intellektuális komponens nélkül csak kaotikus lehet."
"A belső vezérlésre esetén a vezérlési algoritmusok és más információ be vannak építve az objektumba. Például, ide tartoznak
- - automatikusan működő műszaki rendszerek
- - költöző madarak autonóm repülése
- - a DNS-ben tárolt információ, mely alapján történik a fehérje szintézise."
"Nyilvánvaló, hogy bonyolult dinamikus tulajdonsággal rendelkező objektumok bonyolultabb intellektuális komponenst igényelnek."
"Ha valaki az evolúcióelmélet alapján kijelenti, hogy az élővilág (az embert is beleértve) spontán módon jött létre, akkor ez a kijelentés azt jelenti, hogy egyidejűleg:
Bk << Bn
és
Ik >> In, In = 0
(0 érték azt jelenti, hogy nincs szükség intellektuális erőforrásra, mivel a rendszer spontán módon jött létre). Természetesen a gyakorlatban ezt nem tapasztalható. Tényleg, ha kijelentjük, hogy egy rendszer spontán, kaotikus módon jött létre, akkor egyidejűleg ez azt is jelenti, hogy ebben az esetben nincs szükség intellektuális erőforrásra, hiányzik a célvektor, hiányoznak a vezérlő algoritmusok. Ez abszurdum, mivel még a legegyszerűbb objektum létrehozása is bizonyos intellektuális erőforrást igényel."
Kemény szavak ezek valóban, de olvassunk csak el egy összefoglaló közleményt, ami a PLoS Biology című lapban jelent meg nemrég! Maga a cikk egyébként bárki számára ingyen hozzáférhető, érdemes megnézni a hozzá mellékelt filmeket is, nagyon aranyosak a küszködő robotok. Miről is szól ez a közlemény? Több kísérletet foglal össze, ahol azt vizsgálták, hogy véletlenszerűen előállított vezérlőrendszerek a legalapvetőbb darwini evolúcióval képessé válhatnak –e bonyolult feladatok elvégzésére? Ehhez apró robotokat építettek, amelyek vezérlőprogramját véletlenszerűen állították elő, majd kiválasztották a legjobban működőket (=szelekció), ezekben hibákat hoztak létre a programokban (=mutáció) és újra a legnagyobb fittneszű programot kiválasztva abban újra véletlenszerű hibákat hoztak létre. Ezeket a kísérleti rendszereket nem meglepő módon "evolúciós robotikának" nevezték el. No de min is dolgoztak ezek a derék kutatók?
A program maga mesterséges idegsejtek működésén alapul, az input neuronok a robot érzékelőihez kapcsolódnak, az output neuronok a motorjait irányítják. Az idegi hálózatokat teljesen véletlenszerűen alakították ki, majd a robotokat egy adott környezetbe helyezve mérték az egyes változatok fittnesszét, azaz, hogy milyen jól boldogultak az adott körülmények között. Egy adott populáción belül minden egyed programja más és más, mind különböző idegsejthálózatot ír le, így minden egyes robot másképpen válaszol a környezetre. A kísérletek elején a robotok nyilván teljesen véletlenszerűen mozogtak, ám néhány nemzedéknyi mutáció-szelekció után már kialakultak egészen magas életképességű egyedek is.
Az első kísérletben a robotokat egy egyszerű akadálypályára helyezték, a fittnessz itt attól függött, hányszor ütközik a robot a falnak, azaz az ütközés nélkül közlekedők számítottak "életképesebbnek". A robotnak két kereke és nyolc távolságérzékelője volt, hat az egyik oldalán, kettő a másikon. Nyolcvan egyedes populációkkal dolgoztak és nem meglepő módon azt találták, hogy száz nemzedék alatt a legtöbb robot gond nélkül haladt át az akadálypályán. Bár a fittnessz szempontjából nem különböztettek meg haladási irányt, a legjobban teljesítő robotok mind a hat érzékelős felükkel előre közlekedtek. Érdekes módon a robotok sebessége csak fele volt a végsebességüknek és ez újabb száz nemzedéknyi evolúció után sem növekedett. Ekkor a kísérletet végzők megvizsgálták, miért nem mennek gyorsabban a robotjaik és azt találták, hogy a jószágok távolságérzékelői 300 ms –enként mérték meg a faltól való távolságot, így a végsebesség felénél gyorsabban haladó egyedek egyszerűen olyan gyorsan mentek, hogy nem érzékelték időben a falat, így neki is mentek. Megint igaza lett Leslie Orgelnek, az ő második szabálya ugyanis így hangzik: "Az evolúció okosabb nálad."
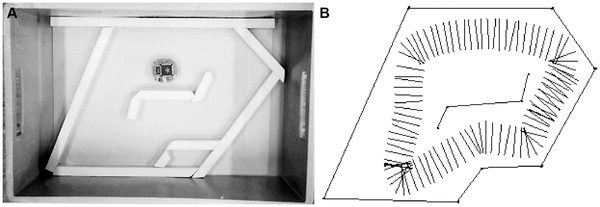
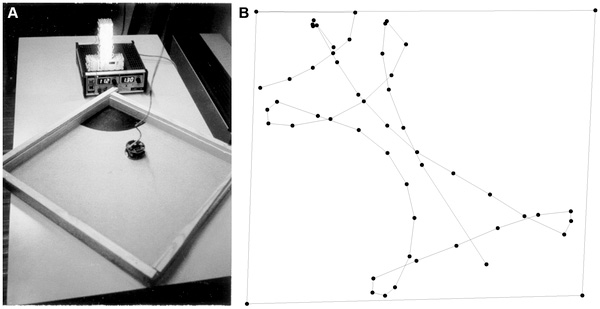
A következő kísérletben megvizsgálták, hogy ugyanilyen evolúciós folyamatokkal kialakulhatnak –e "hazatérő" robotok, ugyanis erről a képességről általában úgy gondolják, hogy a környezet valamilyen belső modellje szükséges hozzá. Egy négyzet alakú pályát építettek, aminek az egyik sarkát feketére festették, ez a "fészkük", e fölé a pont fölé egy lámpát állítottak, hogy a robotok érzékelhessék a helyét. A robotokat egy szimulált elem hajtotta, ami ötven érzékelési-mozgási körre elegendő energiát tárolt, és ami azonnal feltöltődött, amikor a robot a fekete mezőre hajtott. Ezen kívül kaptak egy talajszínt érzékelő alkatrészt is, hogy meg tudják különböztetni a fészket a pálya többi részétől, két fényérzékelőt is kaptak, hogy követhessék a lámpát, valamint egy töltésérzékelőt is, hogy az energiaellátásukat figyelhessék. Az egyedek fittnessze egyenes arányban állt a kerekeik átlagos forgási sebességével és a falaktól való távolsággal, ám a kísérletet százötven körön át folytatták, így egy nagy fittnesszű robotnak legalább kétszer vissza kellet térnie a fészkébe, hogy feltöltődjön. Ez az elrendezés körülbelül egy rágcsáló körülményeire hajaz, nagy területen szétszórt élelmet gyűjt napközben, éjjelre pedig visszatér a fészkébe aludni. Az eredmény nem meglepő, kétszáz nemzedéknyi evolúció után a legjobban teljesítő egyedek hosszú gyűjtőutakat tettek a pályán, egytizednyi elemtöltöttségnél azonban visszatértek a fészkükbe, majd ahogy feltöltődtek, megint nekivágtak a pályának. Ezek a robotok már összehasonlították magukban a helyzeti adataikat és a telepük töltöttségéről szerzett adataikat a környezet valamilyen leképezésével.
A következő kísérletben már nem csak egyetlen robot tartózkodott egyszerre a pályán, hanem kettő, egy ragadozó és egy zsákmány. Az első kísérlet robotjait használták, ám a ragadozó három tulajdonságában különbözött a prédától: A préda kétszer gyorsabb volt, mint a ragadozó, a ragadozó egy harmninchat fokos szögű látást biztosító érzékelőt kapott, a zsákmány pedig egy fekete hengert, amiről a ragadozó megismerhette. Így a ragadozó száz centiméterről felismerhette a zsákmányt, ám a zsákmány csak fél centiméterről vehette észre a ragadozót, ám könnyedén lehagyhatta, hiszen sokkal gyorsabb volt.
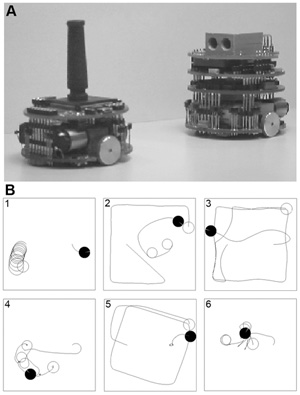 Egy zsákmányt és egy ragadozót helyeztek egy pályára, a ragadozó fittnessze fordított arányban állt a zsákmány elkapásához szükséges idővel (minél hamarabb elkapta, annál magasabb lett a fittnessze), míg a zsákmány fittnessze egyenes arányban állt azzal az idővel, amíg el tudta kerülni, hogy elkapja a ragadozó (minél később kapta el, annál magasabb lett a fittnessze). A különösen érdekes ebben a kísérletben, hogy nem alakultak ki tökéletes ragadozók és tökéletes zsákmányok, a zsákmány viselkedése befolyásolta a ragadozóét és a ragadozóé a zsákmányét. Az első néhány nemzedékben mind a zsákmány, mind a ragadozó véletlenszerűen mozgott (B1. kép). Néhány nemzedék múlva a zsákmány gyorsan keringett a pályán, a ragadozó pedig ahogy meglátta, azonnal elindult felé a legrövidebb úton, amíg el ne kapta (B2. kép). Néhány nemzedék alatt a ragadozók olyan hatékonnyá váltak, hogy elvesztették a falak elkerülésének képességét, mert rendszerint hamarabb elkapták a zsákmányt, mint hogy falba ütköztek volna, így nem nehezedett szelekciós nyomás erre a tulajdonságukra. Később a zsákmány kifejlesztett egy módszert, várta a ragadozót és amikor az megjelent hátrafelé menekült előle. Ez azonban nem nyújtott tökéletes védelmet, mert a robotok oldalán nem voltak érzékelők, ebben a holttérben könnyen támadhatott a ragadozó (B4. kép). Néhány nemzedék után a zsákmány a régebbi módszer újabb változatával állt elő, gyorsan körözött a falak mentén, a ragadozó új módszert fejlesztett ki: A fal mellett lapult, mint egy pók majd lesből rávetette magát az arra haladó zsákmányra, kihasználva, hogy a falak közvetlen közelében a zsákmány érzékelői kisebb eséllyel látták meg (B5. kép). A zsákmány utolsó módszere egyszerűségében nagyszerű: Egy helyben forogva akadályozta meg, hogy a ragadozó az érzékelőkkel nem rendelkező oldalai felől támadhassa meg, amint észrevette a ragadozót, a legtöbb érzékelőjét feléje fordítva hátrált előle. Ezekből a kísérletekből azt a következtetést vonták le, hogy ilyen egyszerű rendszerekkel is rengeteg kifinomult viselkedési minta alakítható ki, de egyik sem maradandó, ugyanis ebben a kísérletben a zsákmány és a ragadozó ko-evolúciója állandóan újabb, az újabb vadász vagy menekülő taktikák ellen is hatásos viselkedések kialakulását eredményezi. Itt ugyanis a ragadozóra ható szelekciós nyomás a zsákmány viselkedésének függvénye, míg a zsákmányra a ragadozó gyakorol nyomást.
Egy zsákmányt és egy ragadozót helyeztek egy pályára, a ragadozó fittnessze fordított arányban állt a zsákmány elkapásához szükséges idővel (minél hamarabb elkapta, annál magasabb lett a fittnessze), míg a zsákmány fittnessze egyenes arányban állt azzal az idővel, amíg el tudta kerülni, hogy elkapja a ragadozó (minél később kapta el, annál magasabb lett a fittnessze). A különösen érdekes ebben a kísérletben, hogy nem alakultak ki tökéletes ragadozók és tökéletes zsákmányok, a zsákmány viselkedése befolyásolta a ragadozóét és a ragadozóé a zsákmányét. Az első néhány nemzedékben mind a zsákmány, mind a ragadozó véletlenszerűen mozgott (B1. kép). Néhány nemzedék múlva a zsákmány gyorsan keringett a pályán, a ragadozó pedig ahogy meglátta, azonnal elindult felé a legrövidebb úton, amíg el ne kapta (B2. kép). Néhány nemzedék alatt a ragadozók olyan hatékonnyá váltak, hogy elvesztették a falak elkerülésének képességét, mert rendszerint hamarabb elkapták a zsákmányt, mint hogy falba ütköztek volna, így nem nehezedett szelekciós nyomás erre a tulajdonságukra. Később a zsákmány kifejlesztett egy módszert, várta a ragadozót és amikor az megjelent hátrafelé menekült előle. Ez azonban nem nyújtott tökéletes védelmet, mert a robotok oldalán nem voltak érzékelők, ebben a holttérben könnyen támadhatott a ragadozó (B4. kép). Néhány nemzedék után a zsákmány a régebbi módszer újabb változatával állt elő, gyorsan körözött a falak mentén, a ragadozó új módszert fejlesztett ki: A fal mellett lapult, mint egy pók majd lesből rávetette magát az arra haladó zsákmányra, kihasználva, hogy a falak közvetlen közelében a zsákmány érzékelői kisebb eséllyel látták meg (B5. kép). A zsákmány utolsó módszere egyszerűségében nagyszerű: Egy helyben forogva akadályozta meg, hogy a ragadozó az érzékelőkkel nem rendelkező oldalai felől támadhassa meg, amint észrevette a ragadozót, a legtöbb érzékelőjét feléje fordítva hátrált előle. Ezekből a kísérletekből azt a következtetést vonták le, hogy ilyen egyszerű rendszerekkel is rengeteg kifinomult viselkedési minta alakítható ki, de egyik sem maradandó, ugyanis ebben a kísérletben a zsákmány és a ragadozó ko-evolúciója állandóan újabb, az újabb vadász vagy menekülő taktikák ellen is hatásos viselkedések kialakulását eredményezi. Itt ugyanis a ragadozóra ható szelekciós nyomás a zsákmány viselkedésének függvénye, míg a zsákmányra a ragadozó gyakorol nyomást.
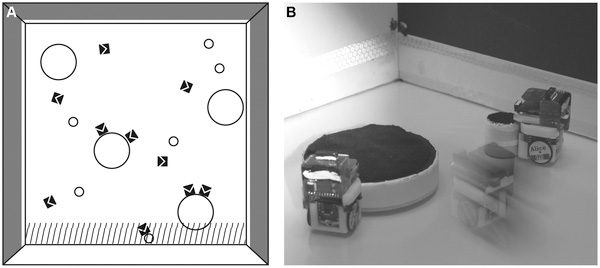
Ha a kreacionisták evolúció cáfolatát olvasgatjuk, az írások legalább felében felbukkan érvként, hogy a "legerősebb túlélése" nem alakíthat ki önzetlen viselkedési formákat, egymás segítését, gondoskodást. Erre is végeztek kísérletet, egy pályán tíz robotot helyeztek el, valamint kicsi és nagy korongokat. A kis korongokat egy robot is el bírta tolni, ha ezt a pálya kijelölt szélére tolta, egy ponttal növekedett a fittnessze. A nagy korongokat csak két robot együttes erővel tudta elmozdítani, azonban ha ezt juttatták a célterületre, a csoport minden egyedének növekedett a fittnessze egy ponttal, azaz összesen tíz pontnyit fittnesszt nyertek. Az első kísérletben csak nagy korongokat helyeztek a pályára, így a robotok csak és kizárólag együtt dolgozva növelhették a fittnesszüket, ebben a helyzetben hamar kialakultak az egymást segítő viselkedésű egyedek, húsz kísérletből húszszor. Ha azonban nagy és kis korongokat is tartalmazott a pálya, kétféle viselkedést mutattak a robotok. Ha "idegenekből" állt a csapat, amelyek vezérlőrendszere nem hasonlított egymásra, a robotok a kis korongokra hajtottak, azokat lökdösték minél hamarabb a célba, hiszen így növelhették a leggyorsabban a saját fittnesszüket. Ha azonban "rokon" egyedeket is tettek a csoportba, azonnal megjelentek az önzetlen viselkedésformák, ha a csapat tagjai ugyanazzal a genommal rendelkeztek, együttes erővel tolták a célba a nagy korongokat. Azt hiszem ennél jobb cáfolata nincs a bekezdés elején említett állításnak.
Ennek fényében vizsgáljuk meg újra Holovács doktor állításait! Hol is volt ezekben a kísérletekben a vezérlő programot előállító értelem? Véletlenszerűen előállt hálózatok mutációjával és szelekciós nyomás alkalmazásával egészen egyszerű rendszerek is képesek bonyolult viselkedésminták kialakítására anélkül, hogy bármilyen értelem beavatkozna ebbe a folyamatba. Akkor mégis mire alapozza a sarkos állításait? Nem igazán tudni. Az első három kísérletet 1994 –ben, 1995 –ben, 1997 –ben közölték le, Holovács doktor előadását az AgriaMedia 2008 konferencián mondta el, vagyis tíz évvel ez után. Miért állítja akkor mégis, hogy "Mivel az információ szellemi, intellektuális kategória, ezért bármilyen vezérlési rendszer tervezése, létrehozása és működtetése megfelelő intellektuális erőforrást igényel."? A fentebb leírt, meglehetősen bonyolult vezérlő rendszerek mégis intellektuális erőforrások befektetése nélkül jöttek létre, véletlenszerűen előállított alakzatokból, egy- kétszáz nemzedéknyi evolúcióval, ráadásul a vizsgált előadás idején jó tíz éve közölt eredmények. Nyilvánvaló, hogy az evolúció ilyen egyszerű rendszerekben is működik, képes bonyolult alakzatok előállítására. Mit gondoljunk akkor erről az előadásról és magáról az előadóról?
Floreano D, Keller L (2010) Evolution of Adaptive Behaviour in Robots by Means of Darwinian Selection. PLoS Biol 8(1): e1000292. doi:10.1371/journal.pbio.1000292




